開発の背景
消費者ニーズの多様化による低農薬志向、環境への負荷低減が求められることにより
生産者は無農薬あるいは減農薬米の栽培に取り組んでおり、合鴨農法もその手段の一つとして普及しています。
しかし、合鴨農法は除草、害虫の防除効果が安定しないことや、アイガモの飼育に手間や費用がかかってしまうため、
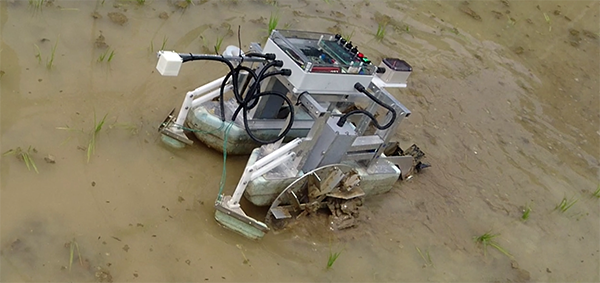
無人で除草を行う『水田用除草ロボット』の開発に着手しました。
性能
車体両側の車輪と後方の車輪で雑草を掘り起こし、土壌から剥離させて枯死させます。
走行は方位センサーにより目標方位にあわせて走行し、前方の稲株センサーで稲株を検知して回避します。
|
最大速度 |
20m/min |
| バッテリー | 7.5vLiPo |
| 連続走行時間 | 約3時間 |
| 本体重量 | 7.5kg |
球体型除草ロボットの研究開発
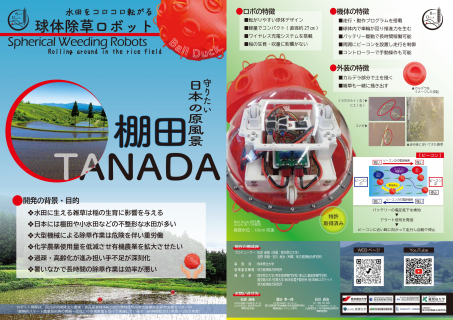
上記の除草ロボットを津山高専さんと一緒に研究開発を行っていたご縁で
球体型除草ロボットの研究開発を行うプロジェクトに参加しています。
詳細に関しては、上記の画像をクリックいただくか下記のページをご覧ください。